This document aims to help you install and run Jason, as well as developing a simple multi-agent system using Jason.
Installation and Configuration
This tutorial uses VSCode + Jason. See here how to configure them.
Execution of an example
Jason comes with many examples and demos. The examples are multi-agent system applications for simple scenarios. The demos are meant simply to show how to use some useful features of Jason.
We will now run the classic Cleaning Robots example:
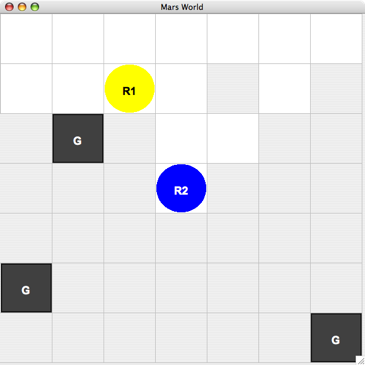
This is a very simple example, showing a robot that searches the whole environment (represented as a grid) for pieces of garbage, and when one is found, it takes it to another robot, located in the centre of the grid, where there is an incinerator; the moving robot then goes back to the place where the last piece of garbage was found and continues the search from there. It is based on the original scenario that Anand Rao used when he introduced the AgentSpeak language.
+
All Jason projects have a configuration file that ends with
.mas2j, so to open the cleaning robots example, open the
folder examples/cleaning-robots in VSCode. You’ll find
in the folder where you installed Jason.
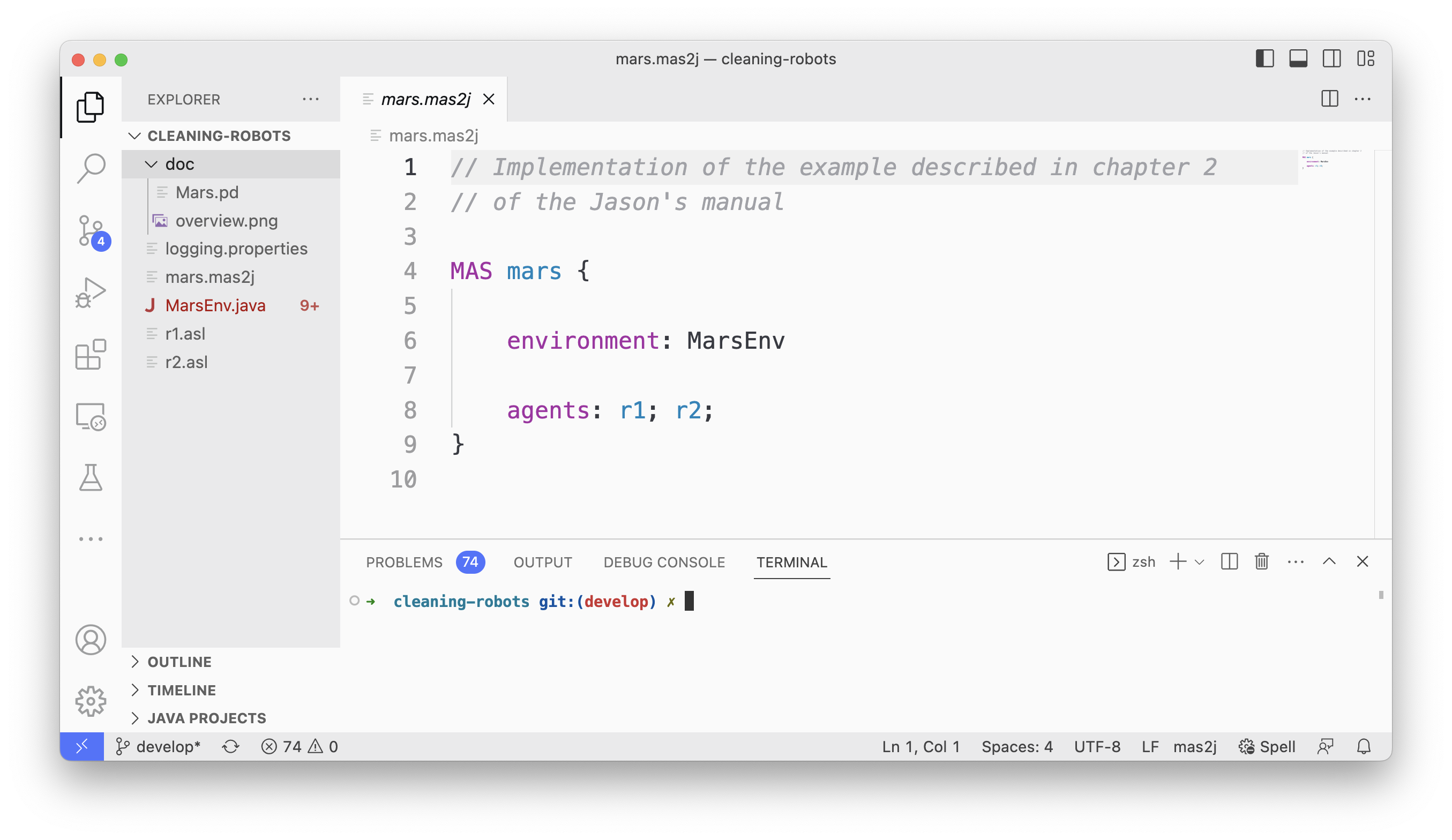
The project file defines the Java
class that implements the environment (MarsEnv), and the agents that
belong to this application (agent r1 searches for pieces of garbage and
r2 incinerates them).
To execute this application, in the VSCode terminal, type
jason mars.mas2j
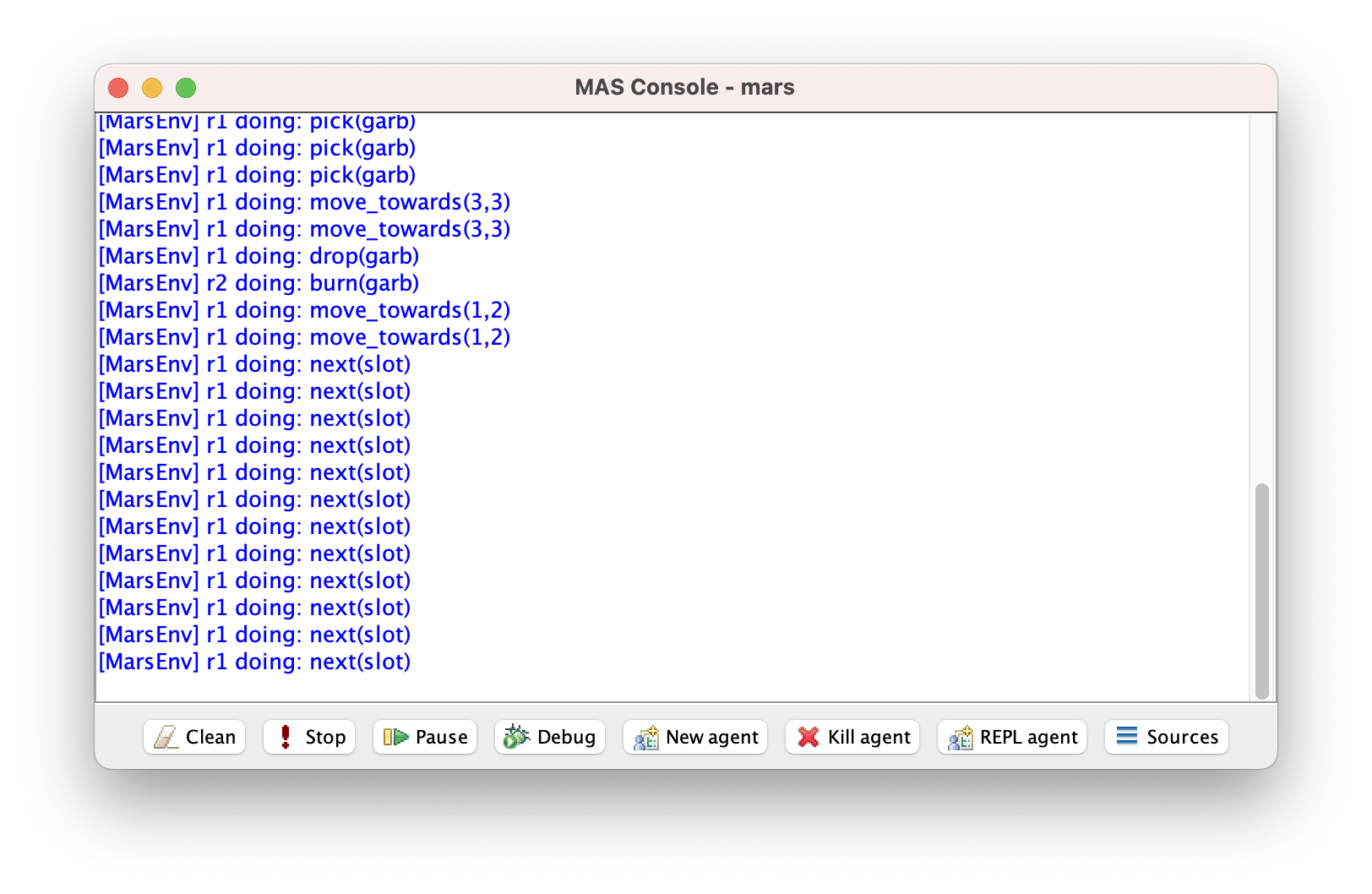
Two windows are opened, the first is the application GUI and the second is the Jason MAS Console where all print messages are shown (MAS is a common abbreviation of Multi-Agent Systems).
To stop the MAS execution, click
on  in the MAS Console.
in the MAS Console.
Creation of a simple example
In this section we will create a new and simple example where two
agents, bob and alice, exchange greeting messages.
-
Create a new application called
greetingwith the command:jason app create greeting
-
Open the folder
greetingin VSCode and you you notice the initial project is created with two agents already.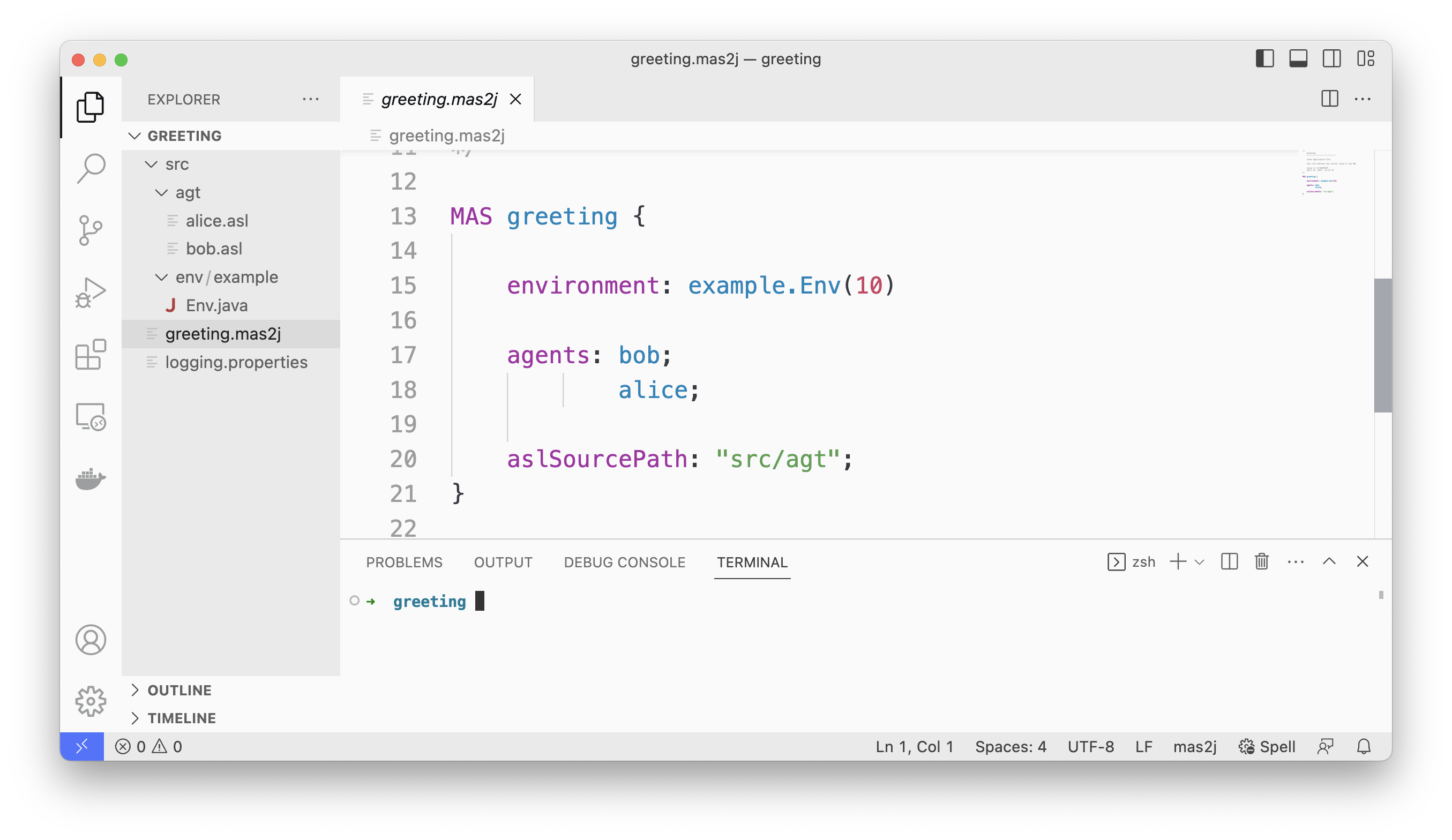
-
As you can see, there is a skeleton for the agent’s code: the agent has no beliefs, but an initial goal
startand one plan to achieve this goal. The plan simply prints something when triggered.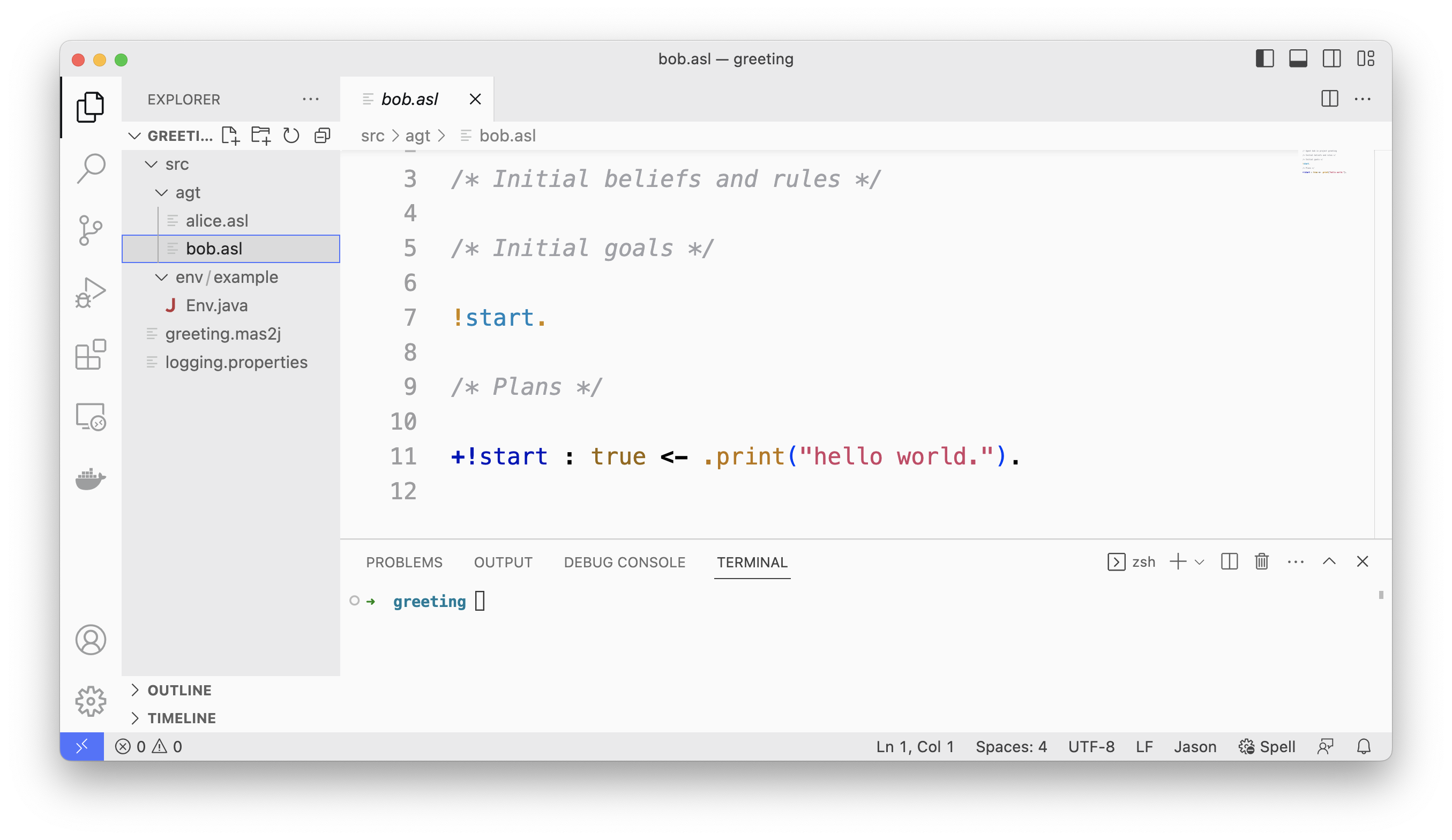
-
We will now change agent
alice's code so that it sends a “hello” message tobob. To send messages, an internal action called.sendis used:src/agt/alice.asl!start. +!start : true <- .send(bob,tell,hello).In
bobcode, we remove thestartgoal (and its related plan), leaving its program empty:src/agt/bob.asl// Agent bob in project greeting.mas2j -
You can now run the application. There is no output! However, in the MAS Console, click on the debug button
 and then select, in a new
windows named Jason Mind Inspector (also available at http://localhost:3272) the agent bob (if the
agent’s list is empty, click once in the run button). The mind
inspector for
and then select, in a new
windows named Jason Mind Inspector (also available at http://localhost:3272) the agent bob (if the
agent’s list is empty, click once in the run button). The mind
inspector for bobwill look as follows: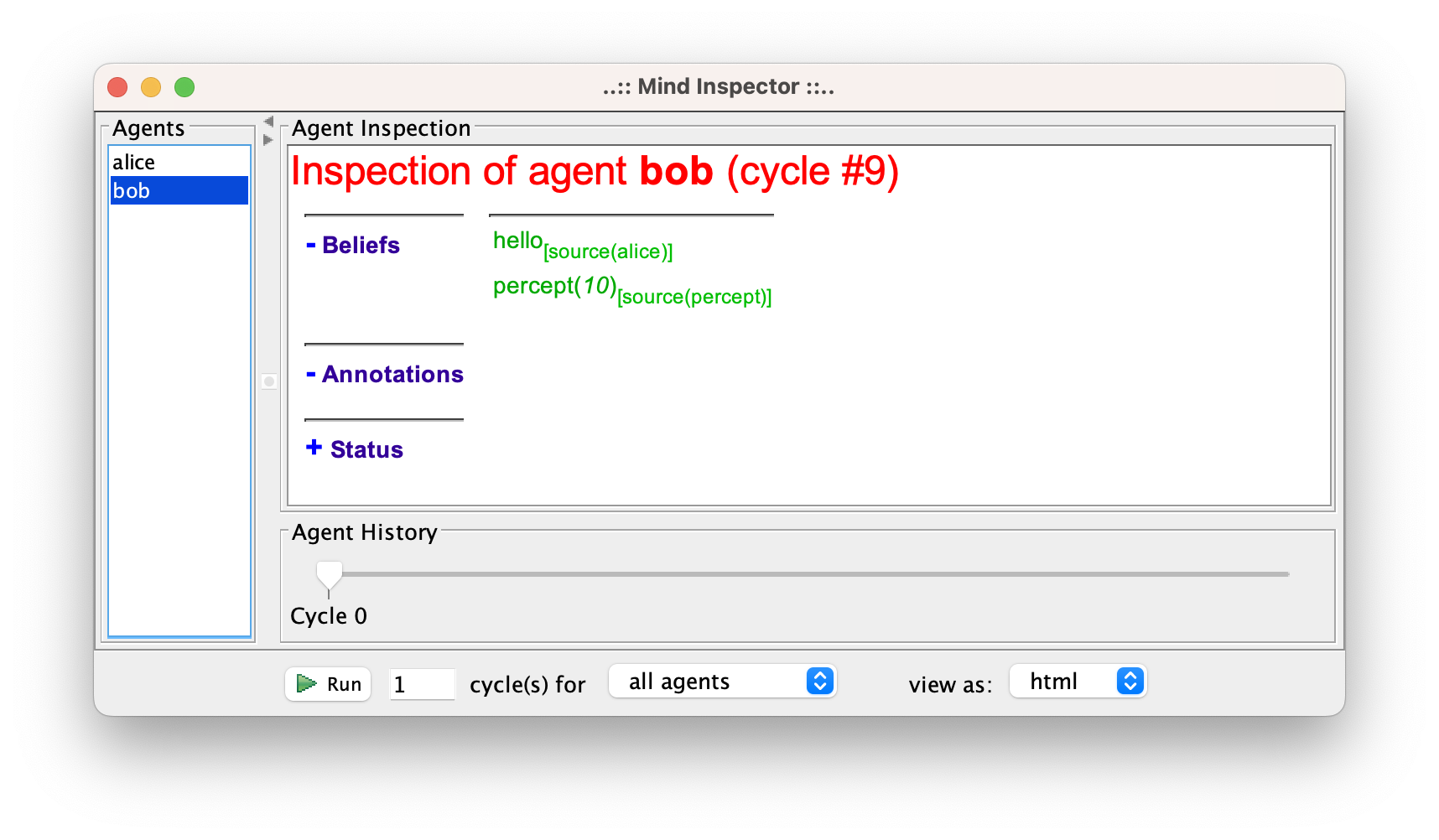
Note the
bobhas a beliefhello[source(alice)], which means that it received alice’s message. -
Suppose now that we want
bobto react to this message. Since the received message implies a belief addition, an event like+hello[source(alice)]is produced and may trigger the execution of the following plan:src/agt/bob.asl// Agent bob in project greeting.mas2j +hello[source(A)] <- .print("I received a 'hello' from ",A).In the plan,
Ais a variable that contains the name of the sender. In AgentSpeak, as in Prolog, identifiers that start with uppercase letters are variables.When you run the new version, the output will be:
[bob] I received a 'hello' from alice
-
Since
bobis a polite agent, we will now make it send a hello back toalice:src/agt/bob.asl+hello[source(A)] <- .print("I received a 'hello' from ",A); .send(A,tell,hello).and
alicedoes the same:src/agt/alice.asl!start. +!start : true <- .send(bob,tell,hello). +hello[source(A)] <- .print("I receive an hello from ",A); .send(A,tell,hello).Before running the system, think what you would expect to happen. Perhaps the agents will enter a kind of greeting loop?
-
Run the system and you will realise that there is no loop! The reason is because when bob receives the second hello, it already has this belief in its belief base (BB). Since nothing changed in the BB, no event was produced, and thus no plan triggered.
-
If you want to use JADE as the infrastructure, execute the following commands:
jason app add-gradle ./gradlew runJade
An example with environment
In this section we will create a system where one agent will perform one action in a simulated environment.
-
In the previous application, add one agent called
lizwith the following code:jason app add-agent liz
then edit the code of the agent to:
src/agt/liz.asl// Agent liz in project testeenv.mas2j !start. +!start : true <- burn.The plan’s body has only the action,
burn. Action here is meant to an environment action (i.e., something that changes the state of the environment), and not internal actions (the ones which starts with a dot, or have a dot anywhere in their name). -
The implementation of the
burnaction is done in an environment class. The project has an initial implementation of the environment insrc/env/example/Env.java.A skeleton for this class is added by Jason. Change it to be exactly as follows:
src/env/example/Env.javapackage example; import jason.asSyntax.*; import jason.environment.*; import java.util.logging.*; public class Env extends Environment { private Logger logger = Logger.getLogger("testenv.mas2j."+Env.class.getName()); /** Called before the MAS execution with the args informed in .mas2j */ @Override public void init(String[] args) { } @Override public boolean executeAction(String agName, Structure action) { if (action.getFunctor().equals("burn")) { addPercept(Literal.parseLiteral("fire")); return true; } else { logger.info("executing: "+action+", but not implemented!"); return false; } } /** Called before the end of MAS execution */ @Override public void stop() { super.stop(); } }When an agent attempts to execute an environment action, the method
executeActionof this class is executed. In this implementation, if the actionburnis executed, a new perceptfirebecomes available to all agents. -
Agent
lizcan now react to the perception of fire:!start. +!start : true <- burn. +fire <- run.(The implementation of the run action is left as an exercise.)
Exercise
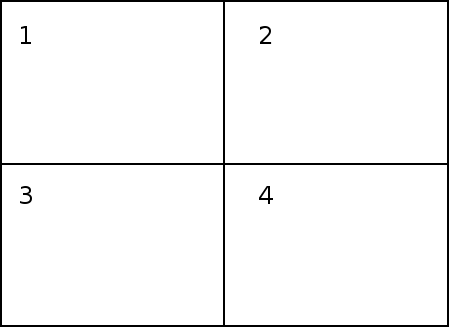
Imagine a very simple environment formed by 4 locations (identified by 1, 2, 3, and 4) as in the figure below:
A vacuum-cleaner robot should be programmed in AgentSpeak to maintain the environment clean. The available actions for the robot are:
-
suck: remove dirt at the robot’s position; -
left: move the left; -
right: move to right; -
up: move up; -
down: move down.
To help the robot decide what action to take, the following percepts are given:
-
dirty: the robot is in a dirty location; -
clean: the robot is in a clean location; -
pos(X): the location of the robot is X (0 < X < 5).
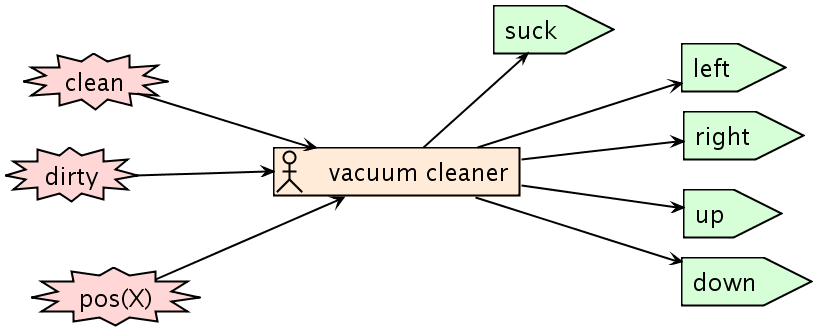
The following diagram, using the Prometheus notation, illustrates the interactions between the robot and the environment.
An implementation of the environment class is available here.
Some tips
You can start programming your agent by thinking about how it should react to the available perception. For instance, what it should do when it perceives "dirty"? The action "suck", of course! In AgentSpeak, we program this reaction by means of a plan as follows:
+dirty <- suck. // when dirty is perceived, do the action suckSo, an initial and very reactive agent can simply react to every perception and be programmed as shown below (replace "someaction" for the action you think is the most suitable, you might also want to remove some of the plans):
+dirty <- someaction.
+clean <- someaction.
+pos(1) <- someaction.
+pos(2) <- someaction.
+pos(3) <- someaction.
+pos(4) <- someaction.Since all perception is also included in the belief base, they can also be used to select the right plan, as in the following example:
+pos(1) : clean <- someaction. // whenever I perceive I'm in pos(1) and
// I believe that my position is clean,
// do some action.You will soon realise that this reactive approach has some limitation in defining a good behaviour for our vacuum cleaner. In fact, this agent should be defined has having goals, in particular, a persistent goal of maintaining the house clean. The easiest way to define a persistent goal is by a recursive plan; for example, the code below implements the persistent goal (represented by p) of printing out "a":
!p. // initial goal
+!p <- .print(a); !p. // to achieve the goal p, print "a"
// and after has p as a new goal.Some comments on possible solutions for this exercise are available here.
This document has shown a very limited range of Jason’s features; the next section contains references where you can find further information.