Introduction
This programming (mini) tutorial illustrates how the BDI model is used in the Jason agent-oriented programming language. We start by a very simple agent code and progress exploring the BDI features of Jason.
We assume that the reader knows the basic concepts of the BDI model (an introduction and further references are found at the Wikipedia). It is important to know these concepts to be a good Jason programmer, in the same way that knowing the concepts of and objects and classes is important for a Java programmer. Very briefly, in the BDI model the agent has beliefs (based on what it perceives and communicates with other agents) that can produce desires (states of the world that the agent wants to achieve). The agent deliberates on its desires and decides to commit to some (desires to which the agent is committed become intentions). To satisfy its intentions, the agent executes plans that lead to action. The behaviour of the agent (i.e., its actions) is thus explained/caused by what it intends (i.e., the desires it decided to pursue). An important feature of architectures that implement the BDI model is that the agent should react to changes in its environment as soon as possible while keeping its pro-active (i.e., desires-oriented) behaviour. (Do not worry about all these high-level anthropomorphic concepts (in italics), we will try to keep the simplicity of usual hello world programs.)
Bob (the mentalist)
Agent program
The Jason program for our agent is the following (since BDI is inspired in folk psychology, we can name this agent Bob):
happy(bob).
!say(hello).
+!say(X) : happy(bob) <- .print(X).As we can see, the syntax is far from the usual C, Java, or Python programs we are used to. For those (rare) guys who have had some contact with Prolog, maybe it looks a bit familiar. The syntax is indeed inspired by Prolog, but the objective is different (the output is not knowledge and the underlying engine is not based on resolution). Let’s read this program:
-
The agent has one (initial) belief:
happy(bob), included by the programmer (rather than by perceiving the state of the environment). This belief can be read as “bob has the property (or predicate) happy”. -
The agent has one (initial) desire:
!say(hello), also included by the programmer. What follows the symbol!describes the desire and is also represented as a Prolog literal. -
The agent has one plan to achieve the desire
say(hello). We can read this plan as “whenever the agent has the desire tosay(X)and believes thathappy(bob), by executing the action.print(X)the desire is achieved, for anyX(which is a variable since it starts with an uppercase letter, as in Prolog)”.
The deliberation process of the BDI model is highly related to plans.
The plan states whether a desire can become an intention by means of
its event and context. In the Bob’s plan, the event is +!say(X)
(what is written before :) and it means the event of having a new
desire to say something. The context is happy(bob) (the part of the
code that goes between : and ←) which is a logical formula
evaluated in regards to the current believes of the agent.
The plan also states how to achieve the desire (i.e. the means-end
reasoning part of the BDI model). If the sequence of actions (after
←) is successfully executed, the desire is (hopefully) achieved. An
intention in Jason is an instantiated plan that the agent is executing
in order to achieve a desire (also called goal).
This program is interpreted by Jason as follows:
-
The initial belief is added in the agent belief base (BB).
-
From the initial desire, the event
+!say(hello)is added in the queue of events to be handled by the agent. -
The plan is included in the plan library (PL) of the agent.
-
A reasoning cycle loop is executed:
-
The event
+!say(hello)is selected from the queue. -
The above plan is selected (it matches the selected event when the variable
Xis bound tohello). -
The context of the plan is evaluated as true since it follows from be BB (i.e. the agent believes
happy(bob)). -
A new intention is created based on this plan and the
Xvalue. The agent has thus committed itself to the desire tosay(hello). -
One action of the intention is executed (the
.print(hello)command in this case). -
Since the intention has executed all actions, it finishes.
-
-
The agent keeps waiting for new events to react to.
Execution
-
Create a new project: you can download and initial JaCaMo project; or create a new one Jason application with JasonCLI:
jason app create bdi_hw. -
Create agent Bob with the source code above (file
bob.asl). The project should look like:Jason .mas2j project JaCaMo .jcm project MAS bdi_hw { agents: bob; }mas bdi_hw { agent bob // file bob.asl at src/agt under the project directory } -
Run the project. In the case of JaCaMo, run the script
./gradlew; in case of Jasonjason bdi_hw.mas2j.
Exercises A
-
Add a new goal for Bob:
say(bonjour). -
Add the following beliefs for Bob:
msg(en,"Hello"). msg(fr,"Bonjour"). msg(pt,"Ola").and change the plan for the goal
sayso that the argument is the language and the message is based on the above beliefs. For instance the goal!say(fr)prints outBonjour.
Bob (the believer)
The second version of agent Bob has neither initial beliefs nor desires:
+happy(bob) <- !say(hello).
+!say(X) : not today(monday) <- .print(X); .wait(500); !say(X).The first plan has a different kind of event: the agent has started to
believe something (the belief that follows +). So when the agent
starts believing that Bob is happy, the desire to say hello
(!say(hello)) is created. In this case, the desire is the result of
changes in the agent’s beliefs. The agent starts believing something
when, for instance, it perceives the state of the environment or
receives a message from another agent.
The second plan has also changed: (i) the agent will decide to pursue
the desire to say something on days other than Monday; (ii) after
printing the message, the desire is kept, producing a loop that will end
on the next Monday. In other words, the intention to achieve !say does
not finish because that intention itself creates a new desire !say
(here also conveniently called sub-goal). Only when this sub-goal is
achieved, the intention finishes (which never happens in the above
plan).
If you run this program, nothing happens! Different from other languages where the programmer defines a sequence of operations, in Jason the programmer declares plans and the order of execution depends on the order of the events that take place on a particular environment.
To interact with Bob, we will create another agent at runtime that informs him about new facts.
-
Run the project.
-
In the MAS Console, click on the button "New REPL agent" and fill "alice" as the name of the new agent.
-
In the Alice interface, enter
.send(bob,tell,happy(bob)). -
You will notice that Bob starts saying hello.
The tell message that Alice sent to Bob is automatically interpreted
by Jason. The default interpretation, since it is a "tell" message, is
to include the content of the message (happy(bob)) in the Bob’s belief
base. When that belief is added in the belief base, the event
+happy(bob) is included in the queue of events. Bob then reacts to
this event creating an intention. You can access the
Jason Mind Inspector to see the Bob’s mental
state (or use the Debug button in the MAS Console):
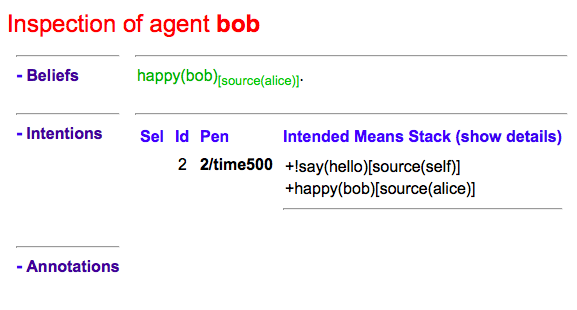
As we can see, the belief is not exactly happy(bob) but
happy(bob)[source(alice)]. The part enclosed by [ and ] are
annotations. All beliefs in Jason have annotations for their sources.
This information can be used, for instance, if an agent needs to
consider only those beliefs that come from trustable sources:
sincere(alice).
+happy(bob)[source(A)] : sincere(A) <- !say(hello(A)).
+!say(X) : not today(monday) <- .print(X); .wait(500); !say(X).This program has a problem, however. Another malicious agent can tell
Bob that it is sincere just before telling him happy(bob)! The source
of the sincere belief should be Bob itself (and not another agent):
sincere(alice).
+happy(bob)[source(A)] : sincere(A)[source(self)] <- !say(hello(A)).
+!say(X) : not today(monday) <- .print(X); .wait(500); !say(X).Exercises B
Using the REPL interface, create a third agent called marcos that runs .send(bob,tell,happy(bob)).
-
How is the belief base of Bob?
-
How many intentions Bob has? Why?
-
Add the belief
sincere(marcos)for Bob and run the exercises 1 and 2 again. -
Create a fourth agent, called
johnthat runs.send(bob,achieve,say(kkk)). What can you infer from theachieveperformative used in this message?
Perception
Besides messages from other agents, another source for beliefs is perception. We will place a calendar in the environment so that Bob can be aware of the current day. It is not the focus of this tutorial to develop the environment, so we will simply copy & paste some code:
-
change the project to:
Jason .mas2j project JaCaMo .jcm project MAS bdi_hw { // CArtAgO environment environment: jaca.CartagoEnvironment // Agent architecture for CArtAgO agents: bob agentArchClass jaca.CAgentArch; }mas bdi_hw { agent bob workspace world { artifact cal: Calendar { focused-by: bob } } } -
Download this file and place it in the directory of the project where artifacts go (when using JaCaMo, this directory usually is
src/env) -
In the beginning of Bob’s program (
bob.asl), add the following lines to give him access to the calendar:If using .mas2j project If using .jcm project !create_calendar. +!create_calendar <- makeArtifact("c","Calendar",[],AId); focus(AId).{ include("$jacamoJar/templates/common-cartago.asl") } -
Run the project and interactively change the current day observing Bob’s belief base and intentions. For example, if you change the day to Monday, the intention will finish. In this case, the intention finishes with failure, since the agent has a desire without a suitable plan.
Exercises C
-
Change the Bob’s program so that no failure is produced on Mondays, but a proper message is printed.
Bob (the vigilant)
The following program for Bob includes alternative plans for the events
happy(H)` and `!say(X).
sincere(alice).
+happy(H)[source(A)] : sincere(A)[source(self)] & .my_name(H) <- !say(hello(A)).
+happy(H) : not .my_name(H) <- !say(i_envy(H)).
+!say(X) : today(friday) <- .print(X,"!!!!!"); .wait(math.random(400)+100); !say(X).
+!say(X) : not today(monday) <- .print(X); .wait(math.random(400)+100); !say(X).
+!say(X) <- !say(X).For each event, one plan is selected according to the context: the first plan with a context that holds is selected to create the intention to react to the event.
The first plan for happy(H)` is used when `H` is `bob` and the source
of `happy(H)` is sincere
(http://jason-lang.github.io/api/jason/stdlib/my_name.html[`.my_name`]
is true if the value of `H` is the name of the agent executing that
internal action). The second plan is used otherwise. The first plan for
`!say(X) is used on Fridays and the second on days other than Monday.
(Notice that there is a plan for Mondays that does not actually say anything
but just keeps the intention alive. Without it Bob would find no plan for
say(X) on Monday and the goal for say(X) would not be re-added. Thus, Bob
would remain mute thereafter.)
Instead of using REPL, we will add a new agent, called Alice, to run
this system. The program for Alice is bellow (in a file named alice.asl).
!start.
+!start
<- .send(bob,tell,happy(bob));
.send(bob,tell,happy(alice));
.wait(2000);
.send(bob,tell,happy(morgana)).The project file has to be updated:
| Jason .mas2j project | JaCaMo .jcm project |
|---|---|
|
|
When running this new application, we can notice how many intentions Bob has now:
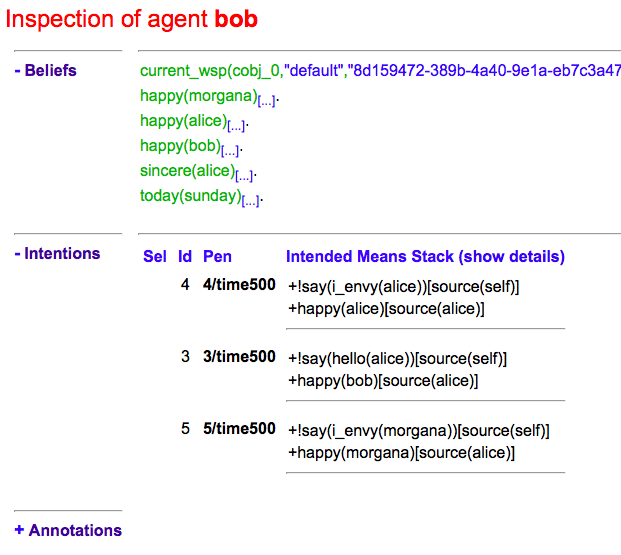
Bob is concurrently executing three intentions: one for each event. More importantly, even with 3 intentions (or 100 intentions) Bob promptly reacts to new events. This reactivity is indeed one of the nicer features of the BDI model. You can test it by creating a new REPL agent that sends tell messages to Bob and see how fast it reacts.
To really stress Bob, we can change Alice’s program as follows:
!start.
+!start
<- .send(bob,tell,happy(bob));
.send(bob,tell,happy(alice));
.wait(2000);
.send(bob,tell,happy(morgana));
for (.range(I,1,100)) {
.send(bob,tell,happy(I));
}.At this point of the tutorial, you could try to imagine how to program this application using conventional languages like Java and C. Even actor-based languages, which are also oriented to events and great tools for concurrency, may not be as simple as Jason.
Exercises D
-
Add the agent Carlos from previous exercise in the project.
-
Write a plan for Bob so that as soon as it realises that someone is happy, he shares this information with Carlos.
-
What happens in the application when Carlos executes
.send(bob,tell,happy(thales))?
Bob (the revisionist)
Another important feature of the BDI model is that agents are able to revise their own intentions. The following plan reacts to the event of stop believing that someone is happy. The reaction is to drop the corresponding intention.
// new plan in Bob's program:
-happy(H)[source(A)]
<- .drop_intention(say(hello(A)));
.drop_intention(say(i_envy(H))).We can test this with the following program for Alice:
!start.
+!start
<- .send(bob,tell,happy(bob));
.send(bob,tell,happy(alice)); .wait(2000);
.send(bob,tell,happy(morgana)); .wait(2000);
.send(bob,untell,happy(bob)); .wait(1000);
.send(bob,untell,happy(alice)).The untell message removes the corresponding belief in the receiver
(only for the belief with that same source, of course).
Exercises E
-
Write a new plan for Bob so that on Saturdays he drops all his intentions. The internal action
.drop_all_intentionsmay help for that. -
Write a plan for Bob so that as soon as it realises that someone is happy, he shares this information with Carlos only if Bob intends to
say(hello(carlos)). The internal action.intendmay help for that.
Bob (the lazy — finally)
This last code for Bob implements the following:
-
On Wednesdays, Bob keeps only two
sayintentions, the others will be suspended. -
On Fridays, suspended intentions are resumed.
-
On Saturdays, all intentions are dropped.
sincere(alice).
+happy(H)[source(A)] : sincere(A)[source(self)] & .my_name(H) <- !say(hello(A)).
+happy(H) : not .my_name(H) <- !say(i_envy(H)).
-happy(H)[source(A)]
<- .drop_intention(say(hello(A)));
.drop_intention(say(i_envy(H))).
+!say(X) : today(friday) <- .print(X,"!!!!!"); .wait(500); !say(X).
+!say(X) : not today(monday) <- .print(X); .wait(math.random(400)+100); !say(X).
+!say(X) <- !say(X).
/**** the following is NEW ****/
+today(wednesday) <- .print("**** Let's slow down.... ****"); !enter_lazy_mode.
+today(friday) <- .print("**** Let's finish the work!"); !resume_all.
+today(saturday) <- .print("**** weekend!"); .drop_all_intentions.
+!enter_lazy_mode
: .findall(A, .intend(say(A)), [_,_|L]) // the agent has at most two active "say" intentions
<- for ( .member(I,L) ) {
.suspend(say(I));
}.
+!enter_lazy_mode.
+!resume_all
: .count( .intend(A) & .suspended(A,R) & .substring("suspended",R), I) & I > 0
<- .resume(say(_));
!resume_all.
+!resume_all.(You can refer to the Jason API for explanations about all the commands used in this example.)
This tutorial showed how some of the (great) BDI concepts become concrete and practical in Jason, particularly long-term intentions and reactivity.